Enhancing Process Performance - Adversarially Robust Real-Time Optimization and Control
 |  |
|---|
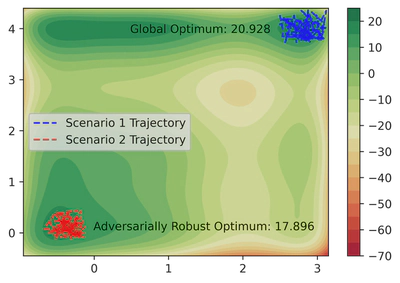
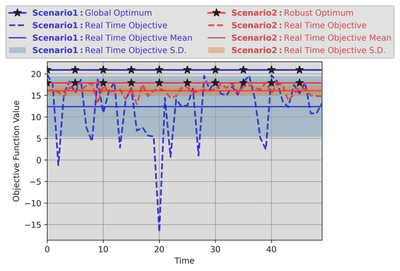
Real-Time Optimization (RTO) plays a crucial role in the process operation hierarchy by determining optimal set-points for the lower-level controllers. However, at the control layer, these set-points may be difficult to track due to challenges in implementation as a result of disturbances, measurement noise, and actuator performance limitations. To address this, we introduced the Adversarially Robust Real-Time Optimization and Control (ARRTOC) algorithm. ARRTOC addresses this issue by finding set-points which are both optimal and inherently robust to implementation errors at the control layers. ARRTOC draws inspiration from adversarial machine learning, offering a novel constrained Adversarially Robust Optimization solution applied to the RTO layer. By integrating controller design with RTO, ARRTOC enhances overall system performance and robustness by ensuring the chosen set-points are tailored to the underlying controller designs. This concept is best illustrated visually as per the attached figures, where the performance of a controller around two possible set-points is compared: the global optimum (scenario 1 in blue) and the adversarially robust optimum (scenario 2 in red). We observe that, paradoxically, operating at the adversarially robust optimum yields a 30% larger mean objective value compared to operating at the global optimum due to its inherent robustness.
Dr. Akhil Ahmed
Head of Innovation at PE Limited, former PhD student at OptiML (2021-2025)
Akhil is a PhD candidate working at the intersection of machine learning, optimization and control. He has a proven track record in practical problem solving across diverse industries and domains with research contributions published in various conferences and journals. He graduated with a first class/distinction from the University of Strathclyde in Chemical and Process Engineering and worked as a scientific software developer and engineering consultant before commencing his doctoral studies. Akhil is a member of the Autonomous Industrial Systems Lab supervised by Mehmet Mercangoz and he is co-supervised by Antonio del Rio Chanona.